BOOLEAN ALJEBRA CALCULATOR
In our circuit, we use Boolean algebra simplification methods like the Quine-McCluskey algorithm to simplify the Boolean expression and display the output on the display. It works as a portable calculator to simplify the Boolean expression on the fly.
Boolean Algebra Calculator Features:
Portable
Fast
Low power
Low cost
Reliable
Block Diagram of Boolean Algebra Calculator:

Figure 2.1 – Block Diagram of Boolean Expression Minimization Calculator
Block Diagram Description:
Above figure shows the basic block diagram of the project. Now let us discuss all the blocks in detail:
Power Supply: It can be defined as a device that supplies electrical energy to one or more electric loads. The term is most commonly applied to devices that convert one form of electrical energy to another, though it may also refer to devices that convert another form of energy (e.g., mechanical, chemical, solar) to electrical energy. In our project a supply mains that is 5volt d.C. is given to the microcontroller, LED’s , keypad, display.
Microcontroller: Microcontroller ATMEGA 16L is used for the automation purpose and acts as brain of the project. It controls the output (Display) according to the input given to it. Read the post: Microcontroller Basics to get basic knowledge about microcontrollers.
Display: The Display used here is 3 Bi-color LED’s. The Glowing Pattern of LED’s represent the desired minimized expression.
Keypad: In this project series of switches have been used as keypad, is used to give the input (min-terms) expression. Each digit on the keypad corresponds to one min-term each.
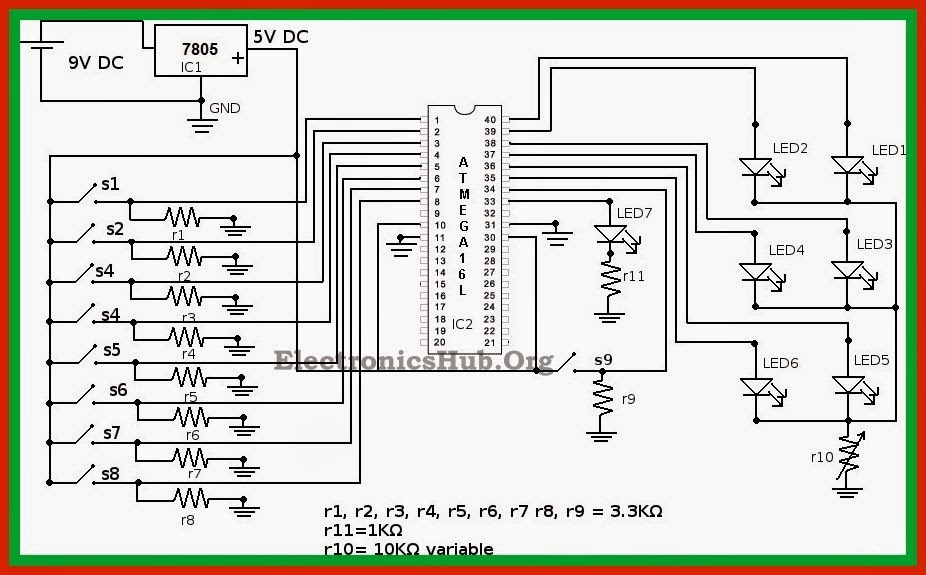
Boolean Algebra Calculator Circuit Diagram:

Circuit Diagram of Boolean Algebra Calculator – ElectronicsHub.Org
Circuit Schematic:
This circuit is a simple 3 variable Boolean expression minimizer. It uses the Quine McCluskey algorithm which was described in the chapter 1.In this the microcontroller plays a major role, it consists of code to implement the described algorithm as well as controlls other components in the circuit.
Initially when the power is switched on an LED will glow which indicates that the microcontroller is ready to take the input. Here the input boolean expression is given in SOP form, i.e only min-terms are to be entered through the keypad provided.
The keypad consists of 9 switches of which 8 switches corresponds to one min-term each and the 9th one is used as next button.After entering the expression the input indicating LED will go OFF, now based on the algorithm microcontroller reduces the expression and the input representing LED glows which means that the expression has been minimized and is displayed.
The display consists of 3 Bi-color LED’s in which Green Light represents the variables in normal form and the rest Red Light represents the variables in the complemented form, the order of them is as shown in the circuit diagram.
The output is displayed as one min-term at a time, next min-term is displayed by pressing the next button and after reaching the last min-term of the reduced expression the input indicating LED is switched OFF which represents end of the output. After few seconds it is again switched ON automatically when microcontroller is ready to take the next input.
Note: For more free circuits, follow t
LINE FOLLOWER ROBOTIC CIRCUIT

This circuit consists of ATmega8 microcontroller, two IR sensors, motors and motor driver IC. The line follower robot needs mechanical arrangement of the chassis. Assume a two wheel robotic vehicle with a castor wheel. The two IR sensors are mounted on the robot facing towards Earth.
When robot is placed on the fixed path, it follows the path by detecting the line. The robot direction of motion depends on the two sensors outputs. When the two sensors are on the line of path, robot moves forward. If the left sensor moves away from the line, robot moves towards right. Similarly, if right sensor moves away from the path, robot moves towards its left. Whenever robot moves away from its path it is detected by the IR sensorIR sensor consists of IR transmitter and IR receiver on a board. When the vehicle is moving on a black line, IR rays are continuously absorbed by the black surface and there is no reflected ray making output high. Whenever, the robot moves out to the white surface, it starts reflecting the IR rays and making the output low. Thus depending on the output of IR sensor microcontroller indicates the motors to change their direction.
Components:-
ATmega8 microcontroller
Motor driver IC (L293D)
Motors
Resistors-R1 to R4.
IR transmitters – IR TX1,IR TX2
IR Receivers -IR RX1,IR RX2
Design of IR Sensors:
IR sensor circuit consists of mainly IR transmitter and IR receiver. IR transmitter is similar to an LED. Its operating voltage is around 1.4V. So to protect it, a 10k resistor is placed before IR and is connected in forward biased. IR receiver is connected in reverse bias and a 15K resistor is placed between VCC and the receiver. Output is taken between resistor and IR receiver.
Line Following Robotic Vehicle Circuit Working:
Initially draw the path on the chart with black color.
Place the robot on the chart.
Now power the circuit.
Robot moves in the specified path.
When it moves out of path, sensors check it and automatically adjust the robot.
Working of IR Sensors:
The IR transmitter continuously transmits the IR rays. When IR transmitter is on the black surface these rays were absorbed by the surface and when it is on white surface these rays were reflected. The IR receiver has maximum resistance when no IR rays are received and voltage from VCC flows through the resistor. At the output pin, voltage is approximately 5v.
As the intensity IR rays received by the receiver increases, resistance value decreases and reverse break down occurs .Thus voltage through the resistor is grounded. So, at the output pin, it will produce 0V.
Line Following Robot Circuit Applications:
This can be used in driver less car system with some added features like obstacle detection.
This can also be used in industrial and defense applications.
Limitations of Line Follower Robot:
Line follower robot requires 2-3 inches broad line.
It may not move properly if the black line drawn is of low intensity.
The IR sensors may sometimes absorb IR rays from surroundings also. As a result, robots may move in improper way.
Note: If anybody interested on more robotics projects, visit the page: Robotics Projects
METAL DETECTOR ROBOTIC VEHICLE
 Land mines buried under the ground causes threat to the lives and affect the economy of the nation. Detection and removing of these mines manually is a dangerous task, which may sometimes causes accidents. In such situations robots aid in detection of the land mines. Not only land mines, these robots can be used to detect any other metals presented in the ground. This article explains the metal detection robot that uses RF technology. Before going to know about this metal detector robotic vehicle, get an idea about how a metal detector circuit works.
Land mines buried under the ground causes threat to the lives and affect the economy of the nation. Detection and removing of these mines manually is a dangerous task, which may sometimes causes accidents. In such situations robots aid in detection of the land mines. Not only land mines, these robots can be used to detect any other metals presented in the ground. This article explains the metal detection robot that uses RF technology. Before going to know about this metal detector robotic vehicle, get an idea about how a metal detector circuit works.
Wireless Metal Detector Robot Circuit Principle:
The proposed system consists of transmitter and receiver circuit. The transmitter circuit transmits the commands required to operate the robot. The receiver circuit receives these commands through RF and moves the robot according to the received commands. A metal detector is interfaced to the controller in the receiver side. Thus whenever any metal is detected the robot stops there and buzzer starts ringing.
Wireless Metal Detector Robot Circuit Diagram:
Transmitter Circuit:

Metal Detector Robot – Transmitter
Receiver Circuit:

Metal Detector Robot – Receiver Circuit
Circuit Components:
Hardware Components:
AT89c51 microcontroller.
RF encoder and decoder
RF transmitter and receiver pair.
Push buttons.
Buzzer.
Robot.
L293d
Rs 232 cable.
Software Components:
Keil software
Flash magic
Proteus.
Circuit Design of Metal Detector Robot using Microcontroller:
The metal detection robot project can be divided into sections 1) Transmitter section, 2) Receiver section.
The transmitter section consists of RF encoder, RF transmitter and Push buttons. RF encoder IC used here is HT12E.It is an 18 pin IC .The 4-bit binary input is applied to the decoder through the AD0, AD1, AD2, AD3 pins. The TE pin enables the transmission when it is low.A0-A7 are the address pins used for secured transmission. These pins are connected to ground in the transmitter circuit. The 4-bit data is transmitted to the RF transmitter parallelly. This is transmitted to the RF receiver serially. Input is given to the encoder through buttons. The RF pair operates with a frequency of 434 kHz.
Receiver section consists of AT89c51 microcontroller, RF decoder, RF receiver, metal detector, buzzer, L293d IC and robot.
The data received is applied to the RF decoder. The RF decoder used here is HT12D. Decoded inputs are connected port 2 of the microcontroller. The four data pins D0-D3 are connected to the Port P2.0 – P2.3.The decoded data is applied to the microcontroller which controls the movement of the robot. The buzzer is connected to the port 3.4 and this rings when any metal is detected in its path.
Metal detector is connected to the pin 3.2 of the microcontroller. Here in place of metal detector a push button is connected. Metal detector plays a main role in the circuit. This will have an oscillator inside it, which produces an alternating current that passes through the coil producing an alternating magnetic field. When any metal is present near the coil this induces magnetic field and thus it can be detected by using another coil which detects the change in the field.
L293d is a motor driving IC .This IC is used to drive the motors.L293d has h-bridge internally. To know more about this IC refer L293D Datasheet.
Wireless Metal Detection Robot Circuit Working:
Initially burn the code into the microcontroller using flash magic.
Now switch on the power supply for the circuit.
Now send the command ‘1’ using the transmitter.
This is transmitted to the receiver.
At the receiver side receiver receives these commands and moves the robot according to the commands.
The following commands moves the robot in the specified directions
Forward
Backward
Left
Right
While robot is moving if any metal is detected in its path, the robot stops there ringing the buzzer.
Again it starts moving when the commands are sent from the transmitter.
Metal Detector Robot Circuit Algorithm:
Initially, declare port2 as input as this is connected to the decoded input.
Now declare port1 as output as the motor pins of the robot are connected to the port1.
Enable the external interrupt.
Now check the input of port2.
If the received value is equal to 1 then move the robot in forward direction by making port value as 0×01.similarly move the robot according to the input value.
When interrupt occurs make the output pins to the motor low. This is written in ISR.
Microcontroller based Metal Detector Robot Applications:
These robots are used in detecting landmines.
Robots are used for in detecting the minerals present in the ground.
These robots are used for detecting the bombs.
These can be used in construction industry for locating steel bars present in concrete.
They are used in airports and building security to detect the weapons.
Limitations of the Circuit:
The transmitter can operate the robot only in the range of RF that is approximately 30 metres.
NI CD BATTERY CHARGER

 Battery Charger Project
Battery Charger Project
In our project we have used 2AA size Ni-Cd Battery which is commonly available and can be used in many appliances. This circuit can also recharge common dry cell battery for fewer times at certain level.

Nickel-cadmium cells have potential of 1.2 V. So Nickel-cadmium batteries come in multiple of 1.2 V for eg 2.4V, 3.6V, 4.8V etc but it maintains constant voltage throughout their service life and about 0.8–1 V when discharged.
The chemical reaction which occurs in a NiCd battery is:
2 NiO(OH) + Cd + 2 H2O ↔ 2 Ni(OH)2 + Cd(OH)2
Here is a simple and slow charger for better life of small Ni-Cd battery. Charge it for 6-12 hrs using this circuit.

circuit diagram of Nickel Cadmium (Ni Cd) battery charger
Part List:
Step Down Transformer 0-6 V
Mains Cord
Diode 4007
Resistance 10 Ω X2 Pcs
LED
Battery Container
tube light

 

The circuit illustrated below can RE use your thrown tube light. which usually blinks in normal circuit. A high DC voltage has advantage to glow a a weak florescent tube light. A weak florescent tube gets black at one edge. At black end Positive voltage should be applied and can be marked as anode and other clear end cathode can be marked for Negative voltage or electron will be supplie
Telescope
 A telescope is an instrument that makes a far away object look closer. To do this, a telescope has a device that collects light from a distant object (objective lens or primary mirror) and brings that light (image) to a focus where a second device (eyepiece lens) magnifies the image and brings it to your eye. To make a simple telescope at home, you will need the following:
A telescope is an instrument that makes a far away object look closer. To do this, a telescope has a device that collects light from a distant object (objective lens or primary mirror) and brings that light (image) to a focus where a second device (eyepiece lens) magnifies the image and brings it to your eye. To make a simple telescope at home, you will need the following:

*Two Magnifying glasses – perhaps 1 – 1.5 inches (2.5-3 cm) diameter (it works best if one is larger than the other)
* A Cardboard Tube- paper towel roll or gift-wrapping paper roll (it helps if it is long)
* Duct Tape
* Scissors
* A Ruler, yard stick, or tape measure
* Sheet of printed paper- newspaper or magazine will do.
To assemble your telescope, do the following:
1. Get the two magnifying glasses and a sheet of printed paper.
2. Hold one magnifying glass (the bigger one) between you and the paper. The image of the print will look blurry.
3. Place the second magnifying glass between your eye and the first magnifying glass.
4. Move the second glass forward or backward until the print comes into sharp focus. You will notice that the print appears larger and upside down.
5. Have a friend measure the distance between the two magnifying glasses and write the distance down.
6. Cut a slot in the cardboard tube near the front opening about an inch (2.5 cm)away. Do not cut all the way through the tube. The slot should be able to m hold the large magnifying glass.
7. Cut a second slot in the tube the same distance from the first slot as your friend wrote down. This is where the second magnifying glass will go.
8. Place the two magnifying glasses in their slots (big one at front, little one at back) and tape them in with the duct tape
9. Leave about 0.5 – 1 inch (1 – 2 cm) of tube behind the small magnifying glass and cut off any excess tube remaining.
10. Check to see that it works by looking at the printed page. You may have to play slightly to get the exact distances between the two glasses right so that the image comes to a focus.
You have just built a simple refracting telescope! With your telescope, you should be able to see the moon and some star clusters as well as terrestrial objects (i.e. birds).
Dynamo
 

Consider a coil of fine insulated wire wound on a plastic or cardboard tube. Connect the ends of the coil to a DC milliammeter or galvanometer (for demonstration purposes!). A center-zero meter is preferred for this demonstration. Now take a bar magnet and thrust the magnet into the coil. The meter will deflect. Now withdraw the magnet. The meter deflects the other way. As we insert and withdraw the magnet, the meter deflects from one side to the other. With the magnet stationary, the meter reads zero. What’s happening? We see that when the magnet is moving, a current is induced in the coil. The moving magnetic field, from the moving magnet, cuts the conductors forming the coil.
Rain alarm

 The circuit illustrated below is used as an electronic letter box. When letter is put inside, a LED glows which indicates the presence.
The circuit illustrated below is used as an electronic letter box. When letter is put inside, a LED glows which indicates the presence.

This circuit uses a popular timer I.C which is 555. I.C 555 is connected as comparator with pin 6 connected with positive supply, the output goes high-1 when the trigger pin 2 is at lower than 1/3 level of the supply voltage. Conversely the output goes low-0 , when it is above 1/3 level. So small change in the voltage of pin 2 is enough to change the output of pin 3 from 1 to 0 and 0 to 1. The output has only two states high and low and can not remain in any intermediate stage. It is power by 9V battery for portable use. The circuit is economic in power consumption. Pin 4,6&8 is connected to the positive supply and pin 1 is grounded.

To detect the present of letter we have used LDR and a source of light. LDR is a special type of resistance whose value depends on the brightness of the light which is falling on it. It has a resistance of about 1 megaohms when in total darkness, but a resistance of only about 2-5 k ohms when brightly illuminated. It responds to a large part of the light spectrum.
The source of light and LDR is so adjusted in the letter box that light will directly fall on the LDR but when letter is kept inside then it will block the beam of light and LDR will be under darkness.
We have made a potential divider circuit with LDR and 100 K variable resistance
connected in series. Voltage is directly proportional to conductance so more voltage we will get by this divider when LDR is getting light and low voltage in darkness. Divided voltage is given to pin 2nd of 555. As soon as LDR gets dark the voltage of the pin 2 drops 1/3 of the supply voltage and pin 3 gets high and LED glows.
We can also use two LED at output pin 3, for present LED 1 and for absent LED 2. For this method one LED is connected as forward bias and other is connected as reverse bias to indicate both high and low conditions. To limit the current of LED resistance is used in series.
For source light, use Red or White LED. For LED 2 and 3 you can use any other color- green, red, yellow or blue.
Electronic letter box
 The circuit illustrated below is used as an electronic letter box. When letter is put inside, a LED glows which indicates the presence.
The circuit illustrated below is used as an electronic letter box. When letter is put inside, a LED glows which indicates the presence.

This circuit uses a popular timer I.C which is 555. I.C 555 is connected as comparator with pin 6 connected with positive supply, the output goes high-1 when the trigger pin 2 is at lower than 1/3 level of the supply voltage. Conversely the output goes low-0 , when it is above 1/3 level. So small change in the voltage of pin 2 is enough to change the output of pin 3 from 1 to 0 and 0 to 1. The output has only two states high and low and can not remain in any intermediate stage. It is power by 9V battery for portable use. The circuit is economic in power consumption. Pin 4,6&8 is connected to the positive supply and pin 1 is grounded.

To detect the present of letter we have used LDR and a source of light. LDR is a special type of resistance whose value depends on the brightness of the light which is falling on it. It has a resistance of about 1 megaohms when in total darkness, but a resistance of only about 2-5 k ohms when brightly illuminated. It responds to a large part of the light spectrum.
The source of light and LDR is so adjusted in the letter box that light will directly fall on the LDR but when letter is kept inside then it will block the beam of light and LDR will be under darkness.
We have made a potential divider circuit with LDR and 100 K variable resistance
connected in series. Voltage is directly proportional to conductance so more voltage we will get by this divider when LDR is getting light and low voltage in darkness. Divided voltage is given to pin 2nd of 555. As soon as LDR gets dark the voltage of the pin 2 drops 1/3 of the supply voltage and pin 3 gets high and LED glows.
We can also use two LED at output pin 3, for present LED 1 and for absent LED 2. For this method one LED is connected as forward bias and other is connected as reverse bias to indicate both high and low conditions. To limit the current of LED resistance is used in series.
For source light, use Red or White LED. For LED 2 and 3 you can use any other color- green, red, yellow or blue.
full wave ractifier
 In full wave rectifier both the both half-cycles of the input are utilized with the help of two or four diode working alternately. For full-wave rectification, use of the transformer is essential (through it is optional for half-wave rectification).
In full wave rectifier both the both half-cycles of the input are utilized with the help of two or four diode working alternately. For full-wave rectification, use of the transformer is essential (through it is optional for half-wave rectification).
Single-Phase Centre-Tap Full-wave rectifier
The full-wave rectifier circuit using two diodes and a centre-tapped transformer shown in Figure 1-1. The centre-tap is usually taken as the ground or zero voltage reference point.

Working
When input ac supply is switched on, the ends M and N of the transformer secondary become +ve and -ve alternately. During the positive half-cycle of the ac input, terminal M is +ve, G is at zero potential and N is at –ve potential. Hence, being forward-biased, diode D1 conducts (but not D2 which is reversed-biased) and current flows along MD1CABG. As a result, positive half-cycle of the voltage appears across RL.
Gsm controlled robot

 GSM controlled robot or SMS controlled robot is a wireless robot which performs the necessary actions by receiving a set of instructions in the form a Short Message Service (SMS). In this project we can control the robot directions like forward, backward, left and right by sending SMS from the mobile. Earlier, we have already seen the working of a DTMF Controlled Robot without using Microcontroller.
GSM controlled robot or SMS controlled robot is a wireless robot which performs the necessary actions by receiving a set of instructions in the form a Short Message Service (SMS). In this project we can control the robot directions like forward, backward, left and right by sending SMS from the mobile. Earlier, we have already seen the working of a DTMF Controlled Robot without using Microcontroller.
This project mainly consists of 2 sections, one is mobile unit and the other one is robot unit. The GSM modem which is fixed at the robot receives the messages sent by the mobile and gives the instructions to the microcontroller to control the robot directions. In this project, we interface 8051 microcontroller with GSM SIM 300. The protocol used for the communication between controller and GSM modem is UART (Universal Asynchronous Receiver-Transmitter). This system continuously checks for message to take the decision for controlling the robot.
GSM Controlled Robot Circuit Principle:
When we send the message from the mobile to the modem, GSM modem sends the below command serially to indicate that new message is received.
+CMTI: “SM”,3
In the above command number 3 indicates the location of the new message. Now we need to read this unread message to display it on LCD. The command to read the message from GSM modem is
at+cmgr=3
Here the number 3 indicates the location of the message to be read. After sending this command to GSM module, modem sends the below command serially.
+CMGR: “REC UNREAD”,”MD-WAYSMS”,,”13/05/20,15:31:48+34″
forward
In the above command “REC UNREAD” indicates that message is unread message, “MD-WAYSMS” indicates sender mobile number or name, 13/05/20 indicates the date, 15:31 indicates time and forward is the content of the message.
From the above command, we need to extract message (forward) sent by the user. Now compare this message with predefined strings (forward, backward, left, right), based on result control the robot.
GSM Controlled Robot Block Diagram:

GSM Controlled Robot – Block Diagram
GSM Controlled Robot using 8051 Microcontroller Circuit:

GSM Controlled Robot Circuit Diagram
Hardware Requirements:
8051 Microcontroller
AT89C51 Programming board
Programming cable
16*2 LCD
MAX 232 level converter
GSM sim 300 module
L293D motor driver
Robot
9V DC batteries – 2
5V power supply circuit
0.1uF ceramic capacitors – 4
33pF capacitors – 2
10uF electrolytic capacitor
12MHz crystal
10k (1/4 watt) resistor
Single pin connecting wires
Software Requirements:
New way to improve efficiency of solar cells
 A mejor limitation in the performance of solar cells happens within the photovoltaic material itself: When photons strike the molecules of a solar cell, they transfer their energy, producing quasi-particles called excitons -- an energized state of molecules. That energized state can hop from one molecule to the next until it's transferred to electrons in a wire, which can light up a bulb or turn a motor.
A mejor limitation in the performance of solar cells happens within the photovoltaic material itself: When photons strike the molecules of a solar cell, they transfer their energy, producing quasi-particles called excitons -- an energized state of molecules. That energized state can hop from one molecule to the next until it's transferred to electrons in a wire, which can light up a bulb or turn a motor.
But as the excitons hop through the material, they are prone to getting stuck in minuscule defects, or traps -- causing them to release their energy as wasted light.
Now a team of researchers at MIT and Harvard University has found a way of rendering excitons immune to these traps, possibly improving photovoltaic devices' efficiency. The work is described in a paper in the journal Nature Materials.
Their approach is based on recent research on exotic electronic states known as topological insulators, in which the bulk of a material is an electrical insulator -- that is, it does not allow electrons to move freely -- while its surface is a good conductor.
The MIT-Harvard team used this underlying principle, called topological protection, but applied it to excitons instead of electrons, explains lead author Joel Yuen, a postdoc in MIT's Center for Excitonics, part of the Research Laboratory of Electronics. Topological protection, he says, "has been a very popular idea in the physics and materials communities in the last few years," and has been successfully applied to both electronic and photonic materials.
Moving on the surface
Topological excitons would move only at the surface of a material, Yuen explains, with the direction of their motion determined by the direction of an applied magnetic field. In that respect, their behavior is similar to that of topological electrons or photons.
In its theoretical analysis, the team studied the behavior of excitons in an organic material, a porphyrin thin film, and determined that their motion through the material would be immune to the kind of defects that tend to trap excitons in conventional solar cells.
The choice of porphyrin for this analysis was based on the fact that it is a well-known and widely studied family of materials, says co-author Semion Saikin, a postdoc at Harvard and an affiliate of the Center for Excitonics. The next step, he says, will be to extend the analysis to other kinds of materials.
While the work so far has been theoretical, experimentalists are eager to pursue the concept. Ultimately, this approach could lead to novel circuits that are similar to electronic devices but based on controlling the flow of excitons rather that electrons, Yuen says. "If there are ever excitonic circuits," he says, "this could be the mechanism" that governs their functioning. But the likely first application of the work would be in creating solar cells that are less vulnerable to the trapping of excitons.
Eric Bittner, a professor of chemistry at the University of Houston who was not associated with this work, says, "The work is interesting on both the fundamental and practical levels. On the fundamental side, it is intriguing that one may be able to create excitonic materials with topological properties. This opens a new avenue for both theoretical and experimental work. … On the practical side, the interesting properties of these materials and the fact that we're talking about pretty simple starting components -- porphyrin thin films -- makes them novel materials for new devices."
The work received support from the U.S. Department of Energy and the Defense Threat Reduction Agency. Norman Yao, a graduate student at Harvard, was also a co-author.
Rram 3D printed memory
 Taiwanese researchers have 3D printed a type of RRAM memory onto a single standard piece of paper.
Taiwanese researchers have 3D printed a type of RRAM memory onto a single standard piece of paper.
While paper is an ideal substrate for printed memory because of its affordability and extreme light weight, it also has a very high absorption rate.
As such, the researchers began by coating it with layers of carbon. They then set out to create an insulator that could be sandwiched between two electrodes and switched between 0 and 1, acting as a single bit of memory.
Using titanium dioxide as the 'ink', the team used a traditional ink-jet printer that had been modified to print dots which would act as the electrodes.
They found that an 8.5 x 11in piece of paper could hold around 1MB of memory.
What's even more impressive is the fact that each bit of memory also has the capability to maintain its state of 0 or 1 for as long as eight minutes without a supply of power.
Although there is still a lot of work to be done before we'll all be able to 3D print our own foldable memory chips at home, the researchers say the discovery is a big step towards integrating memory into future 3D printing applications.
heat senser

 Here is a simple circuit which can be used as a heat sensor. In the following circuit diagram thermistor and 100 Ohms resistance is connected in series and makes a potential divider circuit . If thermistor is of N.T.C (Negative temperature Coefficient ) type then after heating the thermistor its resistance decreases so more current flows through the thermistor and 100 Ohms resistance and we get more voltage at junction of thermistor and resistance. Suppose after heating 110 ohms thermistor its resistance value become 90 Ohms.then according to potential divider circuit the voltage across one resistor equals the ratio of that resistor’s value and the sum of resistances times the voltage across the series combination. This concept is so pervasive it has a name: voltage divider. The input-output relationship for this system, found in this particular case by voltage divider, takes the form of a ratio of the output voltage to the input voltage.
Here is a simple circuit which can be used as a heat sensor. In the following circuit diagram thermistor and 100 Ohms resistance is connected in series and makes a potential divider circuit . If thermistor is of N.T.C (Negative temperature Coefficient ) type then after heating the thermistor its resistance decreases so more current flows through the thermistor and 100 Ohms resistance and we get more voltage at junction of thermistor and resistance. Suppose after heating 110 ohms thermistor its resistance value become 90 Ohms.then according to potential divider circuit the voltage across one resistor equals the ratio of that resistor’s value and the sum of resistances times the voltage across the series combination. This concept is so pervasive it has a name: voltage divider. The input-output relationship for this system, found in this particular case by voltage divider, takes the form of a ratio of the output voltage to the input voltage.
This output voltage is applied to a NPN transistor through a resistance. Emitter voltage is maintain at 4.7 volt with a help of Zener diode.This voltage we will use as compare voltage. Transistor conducts when base voltage is greater than emitter voltage. Transistor conducts as it gets more than 4.7 base Voltage and circuit is completed through buzzer and it gives Sound.
Logic gate

 Logic gates are the building blocks of digital technology. It is a mechanical, optical, or electronic system that performs a logical operation on an input signal. Truth tables are used to help show the function of a logic gate.
Logic gates are the building blocks of digital technology. It is a mechanical, optical, or electronic system that performs a logical operation on an input signal. Truth tables are used to help show the function of a logic gate.
Simple Logic Processor Circuit or you can say a simple computer.

Picture of our Logic Gate Project
Logic gates are primarily implemented using diodes or transistors acting as electronic switches. We have made three basic logic gate using Diode and NPN Transistor. OR Gate, AND Gate and 3rd is NOT Gate. LED’s as indicator used to show output level high(1) or low(0). 3V power supply is enough for the circuit.
Component List :
LED Red or Green – 3Pcs
Mini SPST or slide Switch – 5 Pcs
Diode 4007 – 2Pcs
Transistor BC548 – 3Pcs
Resistance 100 Ohms, 220 Ohms, 1K – 1 Pc each
Resistance 10 K – 3 Pcs
FM transmitter

Capacitor :
10 Mfd, .01 Mfd, .001Mfd, 2.2pf, 4pf, 5pf, 27pf, 68pf
Coil : 6-7 Turns using 26 SWG Wire
Resistance :
3.3K, 2.7K, 3.9K, 220 Ohms
Transistor=494B
Mic = Condenser Mic
3V battery with Container, Switch
solar cell

 The circuit illustrated here is used as Solar Cell. You can get plate from your old faulty solar calculator. Carefully dissemble plate with out tearing its 2 wire. Connect both wire to a LED through a switch. When Solar Plate is kept in sunlight and switched ON you will see LED glows .
The circuit illustrated here is used as Solar Cell. You can get plate from your old faulty solar calculator. Carefully dissemble plate with out tearing its 2 wire. Connect both wire to a LED through a switch. When Solar Plate is kept in sunlight and switched ON you will see LED glows .
Please make sure for the correct polarity of LED.
Theory :
When energy is added to pure silicon, for example in the form of heat, it can cause a few electrons to break free of their bonds and leave their atoms. A hole is left behind in each case. These electrons then wander randomly around the crystalline lattice looking for another hole to fall into. These electrons are called free carriers, and can carry electrical current
Solar Plate can be made by :
Step 1
Stain the Titanium Dioxide with the Natural Dye
Step 2
Coat the Counter Electrode
Step 3
Add the Electrolyte and Assemble the Finished Solar Cell
nand gate
 Transistor = BC548 or any general purpose NPN Transistor will work.
Transistor = BC548 or any general purpose NPN Transistor will work.
LED (Light Emitting Diode) any Color except white.
Resistance = 10 K,270 k and 220 ohms.
3 Pcs Slide Switch
1 battery container for connecting 2 cell.
This circuit works well and consumes only 3 Volt.
Circuit Diagram of NAND GATE is given below.

Other logic gate such as NOT,AND, OR can also be designed by NAND, NOR Gates. So you can use NAND, NOR as Universal gate.
auto street light

Needs no manual operation for switching ON and OFF. When there is a need of light it automatically switches ON. When darkness rises to a certain level then sensor circuit gets activated and switches ON and when there is other source of light i.e. daytime, the street light gets OFF. The sensitiveness of the street light can also be adjusted. In our project we have used four L.E.D as a symbol of street lamp, but for high power switching one can connect Relay (electromagnetic switch) at the output of pin 3 of I.C 555 that will make easy to turn ON/OFF any electrical appliances that are connected through relay.

Principle :
This circuit uses a popular timer I.C 555. I.C 555 is connected as comparator with pin-6 connected with positive rail, the output goes high(1) when the trigger pin 2 is at lower then 1/3rd level of the supply voltage. Conversely the output goes low (0) when it is above 1/3rd level. So small change in the voltage of pin-2 is enough to change the level of output (pin-3) from 1 to 0 and 0 to 1. The output has only two states high and low and can not remain in any intermediate stage. It is powered by a 6V battery for portable use. The circuit is economic in power consumption. Pin 4, 6 and 8 is connected to the positive supply and pin 1 is grounded. To detect the present of an object we have used LDR and a source of light.
LDR is a special type of resistance whose value depends on the brightness of the light which is falling on it. It has resistance of about 1 mega ohm when in total darkness, but a resistance of only about 5k ohms when brightness illuminated. It responds to a large part of light spectrum. We have made a potential divider circuit with LDR and 100K variable resistance connected in series. We know that voltage is directly proportional to conductance so more voltage we will get from this divider when LDR is getting light and low voltage in darkness. This divided voltage is given to pin 2 of IC 555. Variable resistance is so adjusted that it crosses potential of 1/3rd in brightness and fall below 1/3rd in darkness.
Sensitiveness can be adjusted by this variable resistance. As soon as LDR gets dark the voltage of pin 2 drops 1/3rd of the supply voltage and pin 3 gets high and LED or buzzer which is connected to the output gets activated.

Circuit Diagram of Automatic Street Light
Component used :
9v Battery with strip
Switch
L.D.R (Light Depending Resistance)
I.C NE555 with Base
L.E.D (Light Emitting Diode) 3 to 6 pieces.
Variable Resistance of 47 KΩ
P.C.B (Printed Circuit Board of 555 or Vero board.
COMPONENTS :
a) Battery: For 9v power supply we can use 6pcs dry cell or 6F22 9v single piece battery.
b)Switch:Any general purpose switch can be used. Switch is used as circuit breaker.
c) L.D.R: (Light Depending Resistance)
it is a special type of resistance whose value depends on the brightness of light which is falling on it. It has resistance of about 1mega ohm when in total darkness, but a resistance of only about 5k ohms when brightness illuminated. It responds to a large part of light spectrum.
d) L.E.D: (Light Emitting Diode)
A diode is a component that only allows electricity to flow one way. It can be thought as a sort of one way street for electrons. Because of this characteristic, diode are used to transform or rectify AC voltage into a DC voltage. Diodes have two connections, an anode and a cathode. The cathode is the end on the schematic with the point of the triangle pointing towards a line. In other words, the triangle points toward that cathode. The anode is, of course, the opposite end. Current flows from the anode to the cathode.
clap switch
The pulse of clap, which is a trigger for flip-flop makes changes to the output state that is complementary (reverse). Output of flip-flop, which is in the low current form is unable to drive relay so we have used a current amplifier circuit by using Q4 that is a common emitter circuit. Output of Q4 is connected to a Relay (Electromagnetic switch) which works like a mechanical switch and it becomes easy for connecting other electrical appliance.
The relay contact is connected to the power line and hence turns on/off any electrical appliance connected all the way through relay.
.
electronic eye

Subscribe to:
Posts
(
Atom
)





No comments :
Post a Comment